Paper Reading: Ego-planner
Sept
EGO-Planner
An ESDF-free Gradient-based Local Planner for Quadrotors
EGO-Planner 算法摘要:
- 通过比较碰撞轨迹与无碰撞引导路径,得到惩罚函数中的碰撞项
- 轨迹优化器只提取当前轨迹撞到的障碍物的信息
- 如果某段轨迹动力学不可行,则延长该段轨迹分配的时间
- 异性曲线拟合算法——在保持原有轨迹形状的情况下降低轨迹的阶数
Abstract:
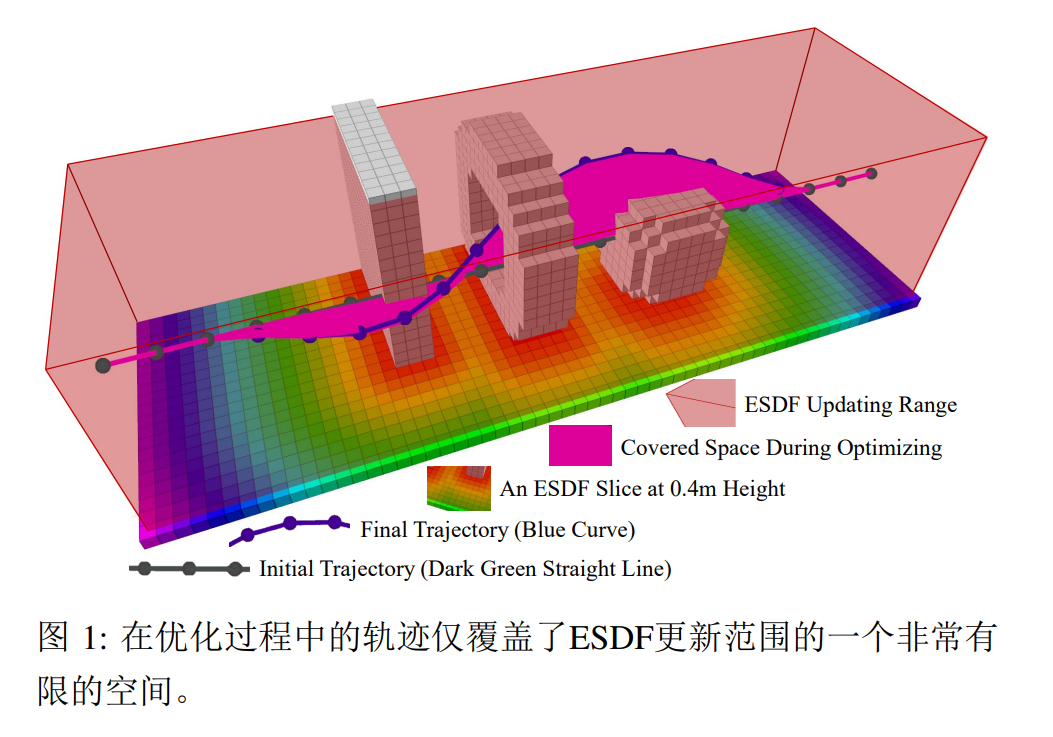
基于梯度的规划器广泛用于四旋翼本地规划,其中欧几里得有符号距离场(ESDF)对于评估梯度大小和方向至关重要。然而,计算这样的场会存在很多冗余,因为轨迹优化过程仅覆盖 ESDF 更新范围的一个非常有限的子空间。本文提出了一种无需ESDF的基于梯度的规划框架(ESDF-free gradient-based planning framework),大大减少了计算时间。主要改进在于通过将碰撞轨迹与无碰撞引导路径进行比较来制定惩罚函数中的碰撞项。仅当轨迹与新障碍物碰撞时,才会存储生成的障碍信息,使规划器仅提取必要的障碍信息。然后,如果违反了动力学可行性,我们会延长时间分配。引入一种各向**异性曲线拟合算法**,以调整轨迹的高阶导数,同时保持原始形状。基准比较和实际实验验证了其鲁棒性和高性能。源代码以 ROS 软件包形式发布。
Basic Knowledge
- 距离函数 -> 有符号距离函数 -> 欧氏有符号距离函数
- 距离场 -> 有符号距离场 -> 欧氏有符号距离场
1 距离函数
有符号距离函数 Signed Distance Functions (SDF)
-
输入:度量空间中的点 \(x\),度量空间的 子集 \(\Omega\)。
-
输出:有符号距离 \(f(x, \Omega)\),点在内部为正,点在外部为负。
2 距离场

Input mask and two visualizations of the resulting SDF.
距离场(Distance Field)是图形学中的一个重要概念,是一个与物体表面距离的标量函数。对于二维或者三维空间中的一个闭合曲面 S,距离场 d(x)定义为从空间中任意一点 x 到曲面 S 的最近距离。
- 距离场可以用于快速计算一个点到曲面上的最近点,只需要沿着梯度方向移动一个距离 \(d(x)\) 就能到达。这可用于三维模型的碰撞检测等。
- 距离场可以用于构建隐式表面(Implicit Surface),即 \(d(x)=0\) 的等值面。这可以表示比较复杂的三维模型。
- 可以根据距离场构建等距曲线或等距面,得到三维模型的轮廓。这可用于图像处理中的形态学操作。
- 可以用距离变换把图像转换为距离场表示,然后进行模糊、膨胀腐蚀等操作。这可用于图片修复去噪等处理。
- 可以利用距离场进行实时渲染,特别是在 GPU 上进行并行计算,可以大大提升渲染效率。
(欧氏) 有符号距离场 (Euclidean) Signed Distance Field
采用有符号距离函数作为距离函数 \(d\) 所建立的距离场。
Introduction
- 四旋翼无人机在线(且局部)的路径规划方法 极大地拓展了无人机的自主性边界;
- 众多轨迹生成与优化方法中,基于梯度的方法通过平滑轨迹并利用梯度信息,能有效地提高轨迹的可行性,显示出巨大的潜力且越来越受欢迎。
- 传统的基于梯度的路径规划器:
- 用预先构建的
欧氏有符号距离场地图来计算梯度的大小和方向 - 使用数值优化方法生成局部最优解
- 优化程序能快速收敛
- 预先计算 ESDF 地图占据了路径规划总时间的 70%,已经成为瓶颈
- 常用方法:
增量全局更新方法与 批处理局部计算方法,但都没有关注轨迹本身,计算了许多对规划没有贡献的 ESDF值。 - 在一般的自主导航情境中,无人机只需要避免局部碰撞,无需建立全局的
EDSDF地图
- 用预先构建的
- 本文提出了一种无需
ESDF、具有碰撞检测和轨迹优化功能的、基于梯度的局部路径规划框架,成为EGO。- 通过平滑度、碰撞和动力可行性等项进行轨迹优化。通过将
障碍物内的轨迹与引导的无碰撞路径进行比较来对碰撞成本进行建模。 - 将
避碰力投影到碰撞轨迹上,生成预估的梯度以将轨迹包裹在障碍物外部。 只在必要时计算梯度,并避免在与局部轨迹无关的区域计算 ESDF。 - 若生成的轨迹不满足要求,则启动后续优化,即给更多的时间进行轨迹优化。
- 首次实现了无
ESDF的基于梯度的局部路径规划方法,使计算时间降低了一个数量级。 - 进行了全面的仿真与实际测试。
- 通过平滑度、碰撞和动力可行性等项进行轨迹优化。通过将
- 本文主要贡献:
- 我们提出了一种轻量级但有效的轨迹优化算法,通过采用各向异性误差惩罚来建模轨迹拟合问题,从而生成更加平滑的轨迹。
- 我们将提出的方法集成到一个完全自主的四旋翼系统中,并将我们的软件发布给社区参考。
- 路径陷入了一个局部最小值,这是非常常见的情况,因为相机无法看到障碍物的背面。